Humanoid Digest: July 2026
If there was any doubt about where humanoid robotics is heading, July provided the answer.
.webp)
September 17, 2025
Category:
Physical AI
Read time:
14 minutes
Share This:
Vision–language–audio (VLA) models aim to endow humanoid robots with human-like perceptual capabilities. Yet audio is often sidelined in favor of vision and language. This paper explores the potential role of audio as a complementary modality, drawing on lessons from autonomous vehicles where microphone arrays detect non-line-of-sight hazards such as emergency sirens.
We argue that while audio is not a silver bullet, it can fill perceptual gaps and provide robustness in occlusion-heavy environments. We examine both the opportunities and challenges of crowdsourced audio data collection through decentralized platforms like Silencio, and propose a tiered sound corpus for embodied AI. Our goal is not to present audio as a standalone driver of humanoid robotics adoption, but as a practical addition to multimodal systems that, if developed thoughtfully, may enhance safety, intuition, and adaptability.
Large multimodal models excel at interpreting images, processing spoken commands, and reasoning in natural language. However, their ability to perceive non-verbal environmental sounds remains underdeveloped. Humans rely on audio for subtle but important tasks: detecting approaching footsteps, inferring intent from vocal tone, or distinguishing a quiet office from a bustling café.
For humanoid robots, neglecting audio risks perceptual blind spots that vision and language alone cannot resolve. That said, the relative importance of audio differs across domains. In household and service environments, it may augment safety and user interaction. In industrial or logistics contexts, it could help detect hazards or localize instructions.
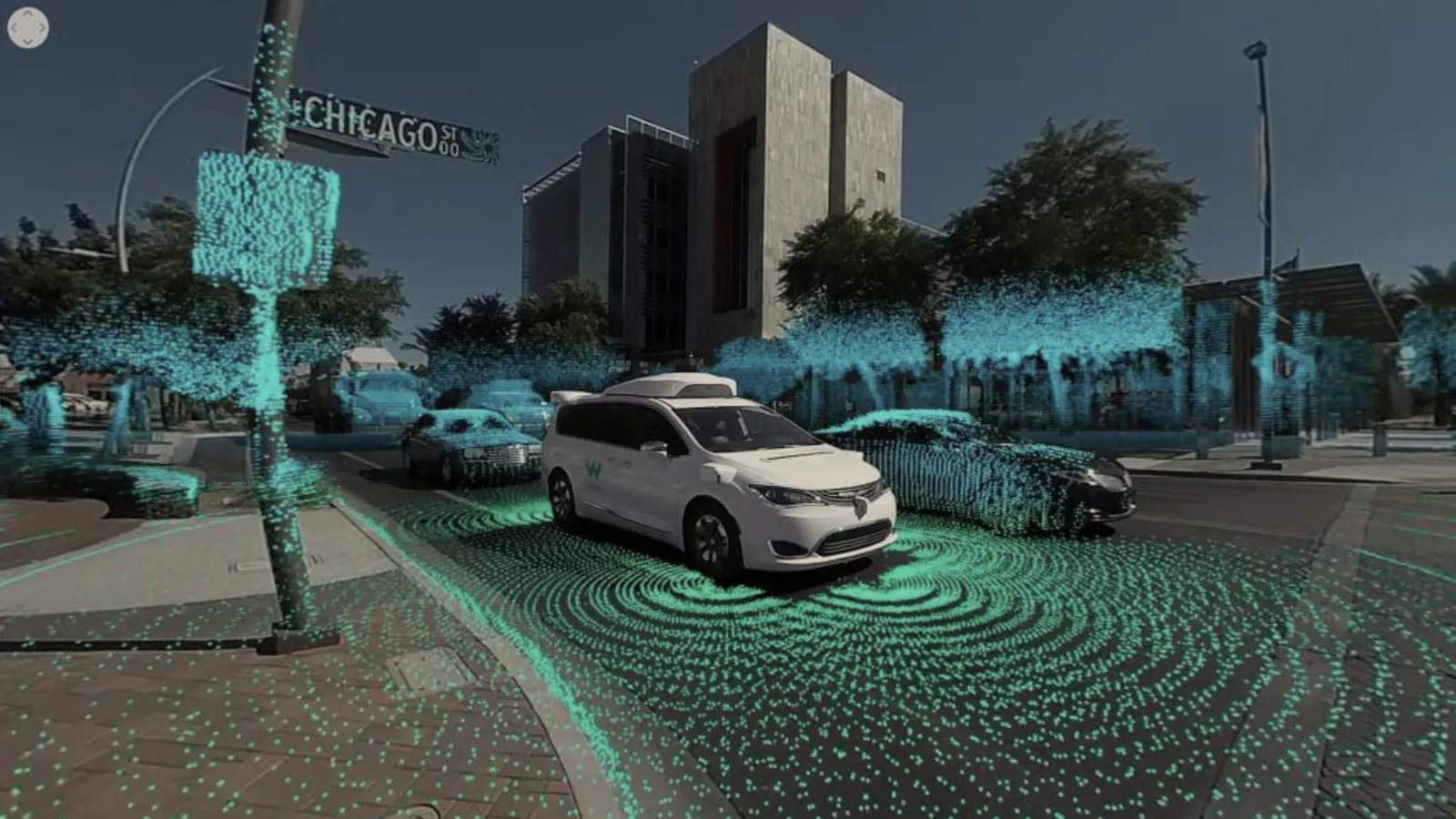
Autonomous vehicles demonstrated that vision and LIDAR alone could miss occluded events, such as emergency vehicles. Microphones added a 360-degree acoustic “field of view.” For example, Waymo’s 2017 tests in Chandler, Arizona, built a sound library enabling vehicles to detect sirens from beyond visual range. These systems required not just recognition but also fast localization with sub-50 ms latency.
XMAQUINA’s DEUS Labs believes that there is value in harnessing decentralized, scalable audio data collection. Through decentralized networks like Silencio, which leverages smartphone-based decentralized physical infrastructure networks (DePIN) to crowdsource ambient and object-related sounds, there is value in collaborating on open comprehensive audio datasets and robust models that empower robots with human-like acoustic awareness.
This paper outlines how these efforts, combined with lessons from automotive audio systems, can address the growing role of audio in Embodied AI.
Humanoid robots already use microphones for speech-to-text processing, but their understanding of non-verbal acoustic signals, such as alarms, environmental cues, or mechanical sounds, remains underdeveloped.
Robust audio perception is important for three reasons:
Still, it is important to note that not all applications require these capabilities, and in some cases visual sensors, radar, or tactile feedback may provide more reliable inputs than microphones. Yet, if the goal is to bring humanoids closer to human-level perception of their environment, then developing robust ways to interpret and reason about the audio channel becomes indispensable.
Early autonomous vehicle prototypes from Waymo and others revealed that vision and LIDAR alone could miss emergency vehicles occluded by traffic or buildings. Microphones provided a 360-degree acoustic “field of view.” For example, Waymo’s 2017 tests in Chandler, Arizona, created a sound library enabling minivans to detect sirens from twice the visual range and estimate their direction for yielding decisions waymo.com. This required not just recognition but localization with under 50 ms latency.
Autonomous-vehicle microphones must withstand harsh conditions—rain, dust, road salt, and pressure-washer blasts. Bosch’s sealed MEMS capsules, mounted behind body panels, use onboard neural filters to isolate sirens from wind or engine noise bosch.com. Renesas demonstrates that distributed sub-arrays at roof corners and bumpers enable precise triangulation at low cost renesas.com.
Academic research supports industry findings. A 2021 study achieved 99% recall and <10 m localization error for sirens using two low-cost microphones arxiv.org. A 2025 MDPI Sensors paper advanced this with adaptive beamforming and transformer-based classifiers optimized for highway speeds mdpi.com. Open datasets like US8K-AV and UrbanSound8K-AV provide annotated street-level audio for training embedded models pmc.ncbi.nlm.nih.gov.
EU regulation 2019/2144 mandates that level-3+ automated vehicles detect emergency vehicles acoustically. Audio is thus a legal and technical necessity in automotive applications. Humanoid robots in shared spaces, sidewalks, warehouses, or hospitals, could face similar regulatory requirements.
Humanoid robots, especially the ones that will serve at home, will operate in cluttered, occlusion-heavy environments where audio cues are vital: a kettle whistling behind a cupboard, a colleague calling from another room, or an alarm signalling danger.
The sensor stacks developed for vehicles, which enable cars to hear ambulances, can empower robots to anticipate humans, align gaze with speakers, or detect hazards before visual confirmation. The hardware to allow robots to hear very efficiently is already well developed and will keep on improving with lower and lower costs.
However, humanoid robotics companies will have to develop their own datasets of sounds and audio experience in order to seed generalized audio embeddings for embodied AI, leveraging transfer learning to accelerate development.
Robust audio perception is critical for humanoid robots to achieve human-like situational awareness in dynamic, occlusion-heavy environments. Existing datasets, such as AudioSet’s 632-class, 2-million-clip ontology, provide a broad foundation for sound classification but fall short for robotic applications due to limited spatial metadata, sparse robot-centric events, and insufficient coverage of safety-critical sounds (research.google.com).
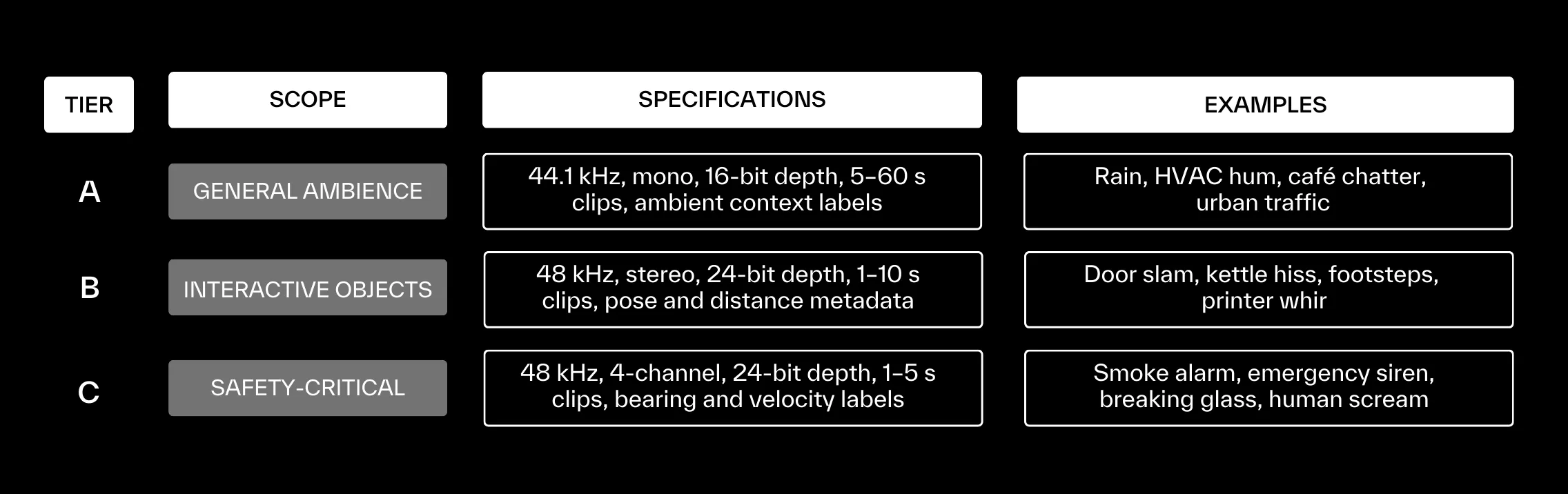
To address these gaps, we propose a tiered sound corpus tailored for models in embodied AI, with specifications designed to support real-time processing, spatial localization, and cross-modal integration.
The corpus is organized into three tiers, each targeting distinct robotic use cases: general environmental awareness, interaction with objects, and safety-critical detection. The table below outlines the scope, technical specifications, and example sounds for each tier.

For Tiers A (general ambience) and B (interactive objects), smartphones offer a scalable, cost-effective solution for crowdsourcing audio data through decentralized physical infrastructure networks (DePIN). Projects like Silencio, originally designed for capturing ambient noise levels, demonstrate the potential of smartphone-based DePIN to collect diverse, geolocated audio datasets. By upgrading such platforms, we can create a global, decentralized audio corpus that is invaluable for developing robust VLA models for humanoid robots.
A user in São Paulo uses a DePIN app to record 30 seconds of street traffic (Tier A) and a 5-second clip of a bicycle bell (Tier B). The app tags the traffic clip with “urban, daytime, Brazil” and the bell clip with “2 m distance, outdoor.” These contributions, aggregated from thousands of users globally, create a diverse dataset that trains robots to recognize ambient contexts and object interactions across cultures and environments.
While smartphones are ideal for Tiers A and B, Tier C (safety-critical) requires controlled, high-fidelity recordings with precise spatial metadata. DePIN can still contribute indirectly by collecting supplementary data (e.g., urban sirens recorded by users) to pre-train models, which are then fine-tuned with purpose-built, multi-channel recordings from professional rigs.
Autonomous vehicles proved that audio can provide meaningful safety gains when vision falls short. Humanoid robots may similarly benefit, though the urgency and regulatory drivers are not yet in place. Audio should be treated as a complementary modality that enhances robustness.
Decentralized data collection through platforms like Silencio can lower barriers for Tier A and B datasets. Silencio’s DePIN platform could transform audio data collection by crowdsourcing diverse, geolocated soundscapes through millions of smartphones, addressing the limitations of datasets like AudioSet, which lack spatial metadata and robot-centric events.
Future work should focus on expanding this corpus with global, diverse recordings, refining low-latency architectures, and deploying rugged, cost-effective hardware like automotive-grade MEMS microphones. Collaborative efforts, inspired by automotive precedents and powered by decentralized innovation, will drive this vision forward.
XMAQUINA is a decentralized ecosystem giving members direct access to the rise of humanoid robotics and Physical AI—technologies set to reshape the global economy.
Join thousands of futurists building XMAQUINA DAO and follow us on X for the latest updates.
---------------------
From the World's largest noise level data bank, Silencio is unlocking new ways to capture data to power the full spectrum of audio intelligence for the next generation of AI and Robotics.
Owner: